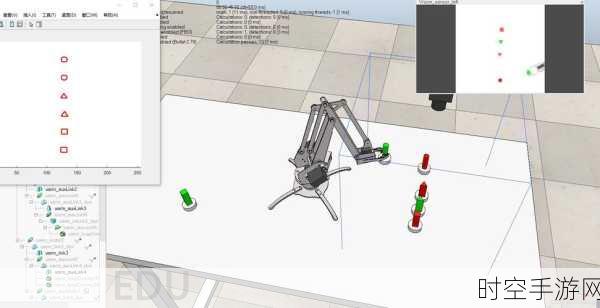
Delta 并联机械手在现代工业中发挥着重要作用,而其视觉相机标定与形状匹配技术更是关键所在。
C#作为一种广泛应用的编程语言,为实现 Delta 并联机械手的精准控制和高效运作提供了有力支持,视觉相机标定旨在确定相机的内外部参数,以获取准确的图像信息,而形状匹配则有助于识别和处理不同的物体形状。

在视觉相机标定方面,需要通过一系列的步骤和方法来实现,要收集大量的图像数据,包括不同角度、不同距离和不同光照条件下的图像,利用特定的算法和数学模型对这些数据进行处理和分析,从而计算出相机的内参和外参,这些参数的准确性直接影响到后续的形状匹配和机械手的控制精度。
形状匹配是 Delta 并联机械手视觉系统中的另一个重要环节,常见的形状匹配方法包括基于特征的匹配和基于模板的匹配,基于特征的匹配通过提取物体的关键特征,如边缘、角点等,来进行匹配;基于模板的匹配则是将待匹配物体与预先定义的模板进行比较,在实际应用中,需要根据具体的场景和需求选择合适的匹配方法,并结合图像处理技术进行优化,以提高匹配的准确性和效率。
为了确保 Delta 并联机械手的视觉相机标定与形状匹配的效果,还需要进行严格的测试和验证,通过对实际样本的检测和分析,评估系统的性能和准确性,并不断调整和优化相关参数和算法。
C#中的 Delta 并联机械手视觉相机标定与形状匹配是一个复杂而又关键的技术领域,深入研究和掌握这一技术,对于提高机械手的智能化水平和工业生产效率具有重要意义。
文章参考来源:相关技术研究文献及工业实践经验。